


精益睿控,致力于為客戶提供高品質的產品和全方位的加工解決方案
關于我們
海德漢編碼器在工業機器人中的應用
發布時間:
2020-07-26
速度、功率和耐用性是工業機器人的重要特點。工業機器人通常應用在汽車組裝線上進行焊接、笨重工件的搬運操作。盡管使用先進的校準方法,但在執行部分任務中,工業機器人的位置精度仍是不理想。現在,這一狀況已被海德漢和其子品牌AMO的高精度輸出端編碼器改變。
研發這款編碼器的目的主要是為了滿足航空航天應用的要求,航空航天業的大型工件必須高精度地進行加工。機床達到高精度不困難,但靈活性不足或專用機床和特殊加工車間的成本過高。可是,機器人可以輕松達到超大型工件的任何位置,例如飛機的機身,在機身上進行鉆孔或銑削。

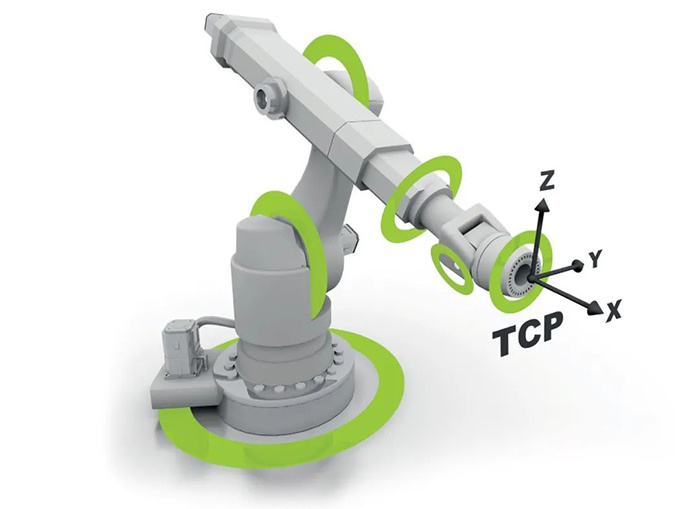
精度的影響因素對于這類應用,刀具中心點(也就是機器人機械臂端頭處的刀具)必須以足夠高的精度進行定位和定向。傳統工業機器人在這方面已接近其極限。導致偏差的因素有多個:
1)為達到所需的機動性,需要使用串聯運動的機器人,例如六軸鉸接式機器人。
2)其中每個軸由齒輪傳動的伺服電機驅動。其誤差主要來自零位誤差、反向間隙和連接彈性。
3)在機械加工中,作用力和動態作用力影響機器人機械系統的剛性,因此影響絕對位置精度。
借助先進的校準方法,現在可將刀具中心點的重復性定點運動精度控制在毫米的幾個百分點以內。部分制造商的鉸接式機器人的重復精度已達到ISO 9283標準的±0.1 mm要求,或更高的精度。
但是,與機器人坐標系內可達到的重復絕對位置精度相比仍低10倍。根據機器人結構設計、最大范圍和最大承重,鉸接式機器人現在的絕對位置精度為±1 mm。這種精度無法滿足航空航天等行業對精度的要求。因此,機器人制造商必須正視該問題。
方法一、高動態性能的電機控制

傳統旋轉編碼器為機器人運動軸的伺服電機持續提供反饋信號。由于伺服電機需要較高的控制動態范圍,海德漢堅固耐用的感應式旋轉編碼器,例如ECI 1100和1300系列或多圈的EQI 1100和1300系列編碼器是這類應用的理想選擇。這些編碼器控制質量高和精度高,而且能承受強烈振動。由于這些編碼器配純串行的EnDat接口,即使應用在強電磁干擾環境中,也不影響數據傳輸的質量或安全性。
這些感應式旋轉編碼器支持SIL 2級、3 PLd級安全性。如果對控制系統增加措施,還支持SIL 3級或4 PLe級安全性。這些編碼器還提供另外一個安全性優點,機械故障防護,避免軸與定子間的連接松動。這些安全措施使這些感應式旋轉編碼器特別適用于人機協作的系統。
方法二、高精度位置測量的輔助編碼器

如果機器人的每個軸增設一套高精度的角度編碼器或旋轉編碼器,機器人制造商將能顯著提高機器人的絕對位置精度。增設的編碼器是輔助編碼器,安裝在每個齒輪傳動的后方,測量機器人每個關節的實際位置。在該設計方案中,這些編碼器將解決零位誤差和反向間隙問題。也能測量加工中各軸所承受的反作用力。所有這些因素將提高刀具中心點的絕對位置精度達70至80%。
方法三、移動式機器人的高精度位置測量

為達到大型工件或長件的所有加工位置,例如飛機機身或大型復合纖維工件的生產,機器人需沿直線軸在工件長度方向進行運動。為確保機器人的高精度地定位,海德漢提供直線電機驅動和長度達30 m的封閉式直線光柵尺。直線光柵尺的位置測量能補償熱位移和其它影響進給機構誤差的因素。這些影響因素無法被滾珠絲杠螺距和電機內旋轉編碼器角度位置的傳統位置檢測方式檢測到。

結論:高精度位置測量提高刀具中心點的位置精度
為機器人每個軸配輔助編碼器和在相對工件定位機器人中采用直線光柵尺測量位置值將顯著提高刀具中心點的位置精度,確保恰當配置的工業機器人能高精度地定位并進行加工以及在工件上執行操作任務。
海德漢和AMO的角度編碼器和直線光柵尺不僅能滿足系統對高精度的要求,而且也能滿足在復雜和緊湊型機器人機械系統內安裝編碼器對靈活性的要求。這些編碼器適用于安全性應用,因此適用于人機協作的系統。
相關新聞



